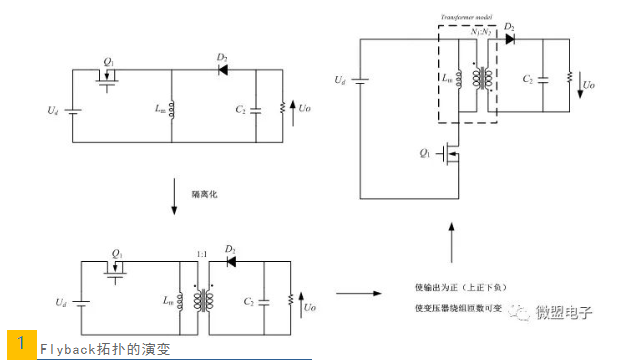
簡單(dān)回顧(gù)一下反(fǎn)激變換的基本原理,Flyback拓撲源於六種基本DC-DC電路之(zhī)一(yī)的(de)Buck-Boost,如下圖所示,Buck-boost電路在連續模式(CCM)下的直流增益是-D/(1-D),輸出電壓極性相反,如果對Buck-Boost進(jìn)行隔離化,同時使變壓器的線圈匝數可變並變(biàn)換輸出(chū)極性,就得到了一個Flyback電路(lù)。
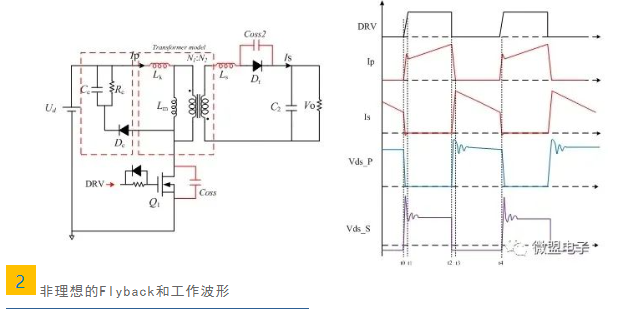
Flyback的(de)工作模式也和(hé)大多(duō)數開關電源一樣,可(kě)以工作在(zài)連續模式(CCM)、斷續模式(DCM)和(hé)臨界(jiè)導通模式(BCM)。如下圖所示,以工作在連續模式(CCM)的反(fǎn)激為例,可(kě)以看到理想(xiǎng)的(de)變壓器模型中還(hái)會存在漏感,實際等效電(diàn)路中還包括了RCD snubber吸(xī)收(增加阻(zǔ)尼,降低Q值),次邊的寄(jì)生電感Ls與續流二極管串聯(包含(hán)了雜散電感、副(fù)邊漏感),以及圖中未表示(shì)完全的各(gè)種寄生的感抗與容抗分布參數。下圖(tú)給出了驅動信號DRV、原邊電流Ip、次邊電流Is、原邊功率極的漏端(duān)電壓Vds_P和次邊同步(bù)整流管的Vds_S(或續(xù)流二極管的(de)反(fǎn)向壓差)。簡單來說,從t0~t2階(jiē)段,勵(lì)磁電感(gǎn)Lm儲能;t2~t4階段,勵磁電(diàn)感(gǎn)儲存(cún)的能量通過變壓器(qì)傳遞到副邊給輸出電容充電。圖中的t2~t3示意性給出了實際工作中存在的換流過(guò)程。
為什麽要加柵極的驅動緩衝(chōng)
01
優化EMI性能
EMI包(bāo)括傳導和輻(fú)射,前者通過寄(jì)生阻抗和其他連接以傳導方式耦合到原件,後者通過磁(cí)場能量以無線(xiàn)方(fāng)式傳輸到(dào)待測器件。
回顧下麥克斯韋方程組中的法拉第電磁感應定律:穿過一個曲麵的磁(cí)通的(de)變化會在此曲麵的(de)任意邊界路徑(jìng)上產生感應電動(dòng)勢,變化的(de)磁場產生環繞的電場。對於輻射而(ér)言,每個環路(lù)都是一個小的天線(xiàn),環路麵積的(de)大小(xiǎo)、負載電流的大小、測試距離的遠近、工作頻率(lǜ)的高低、測試方向夾角的差異,都會(huì)對輻射產(chǎn)生影(yǐng)響。通過布局的優化、降低di/dt和dv/dt噪聲(shēng)、增加EMI濾(lǜ)波等都可以優化EMI。
02
降低次邊續流功率二極管的電壓應力
03
從電路設計的角度出發(fā)可做哪些優化?
實現這種驅動速度調整的方法有很多(duō),比如可以集成(chéng)一個簡單的逐次逼近的SAR ADC,通(tōng)過一個時鍾沿觸發異步時鍾,通(tōng)過SAR邏輯的控製,對驅動(dòng)MOS的柵極信號從0到Miller平台到來(lái)之間(jiān)的時間差進行量化(huà),通過閉環(huán)與目標值進行比較進行調整,直到驅動速度穩定;也可以直接對表征上升沿速度的脈衝信號進行低通濾波獲得表(biǎo)征(zhēng)占空比信(xìn)息(xī)的電壓信號,對此(cǐ)電壓信號進行(háng)誤差調整。
簡單回顧一(yī)下反激變換的基本原理(lǐ),Flyback拓撲源於(yú)六種基本DC-DC電路之一的Buck-Boost,如下圖所示,Buck-boost電路在連續(xù)模式(CCM)下的(de)直流增益是-D/(1-D),輸出電壓極性相反,如果對Buck-Boost進行隔離化,同時使變壓(yā)器的線圈匝數可變並變換輸出極性,就得到了一(yī)個Flyback電路。
Flyback的工作模式也和大多數(shù)開關電源一樣,可以工作在連續模式(shì)(CCM)、斷續模式(DCM)和臨(lín)界(jiè)導通模式(BCM)。如下圖所示,以工(gōng)作在連續模式(CCM)的反(fǎn)激為例,可以(yǐ)看到理想的變壓器模型中還會(huì)存在漏感,實際(jì)等效電路中還包括了RCD snubber吸收(增加阻尼,降低Q值),次邊的寄(jì)生電感(gǎn)Ls與續流(liú)二極(jí)管串聯(包(bāo)含了雜散電感、副邊漏感),以及圖中未表示完全的各種寄生的(de)感抗與容抗分布參數。下圖(tú)給出了驅動信號DRV、原邊電流Ip、次(cì)邊電流Is、原邊功率極的漏端電壓Vds_P和次(cì)邊同步整流(liú)管(guǎn)的Vds_S(或(huò)續流二極管的反(fǎn)向壓差(chà))。簡單來說,從t0~t2階段,勵磁電感Lm儲能;t2~t4階段(duàn),勵磁電感(gǎn)儲存的能量通過變壓器傳遞到(dào)副邊給輸出電容充電。圖中的t2~t3示意性給出(chū)了實際工作(zuò)中存(cún)在的換流(liú)過程(chéng)。
為什麽要加柵極的驅(qū)動緩衝
01
優(yōu)化EMI性能
EMI包括(kuò)傳導和輻射,前者通過寄生阻抗和其他連接以(yǐ)傳導方式耦合(hé)到原(yuán)件,後者通過磁場(chǎng)能(néng)量以無線方式傳輸到待測器件。
回顧下麥克斯韋方程組(zǔ)中的法拉第(dì)電磁感應定律:穿過(guò)一個曲麵的磁通的變化會在此曲麵的任意邊界路徑上(shàng)產生感應電動勢,變化的磁場產生環繞的電場。對於輻射而言,每個環路都是一(yī)個小的天線,環路麵積的大小、負載電流的大小、測試距離的遠近、工作頻率(lǜ)的高低、測試(shì)方向夾角的差異,都會對輻射產生影響。通過布局的優化、降低di/dt和dv/dt噪聲、增加EMI濾波等(děng)都可以優化EMI。
02
降低次邊續流(liú)功率二極管的電壓應力
03
從電路設計的角度出發可做哪些優化?
實現這種驅(qū)動速(sù)度調(diào)整的方法有很多,比如可以集成一個簡單的逐次(cì)逼近的(de)SAR ADC,通過一個時鍾沿觸發異步時鍾,通(tōng)過SAR邏輯的控製,對驅動MOS的柵極信號從0到(dào)Miller平台到來之間的時間差進行量化,通過閉環與目標值(zhí)進行比(bǐ)較進行調整,直到驅動速度穩定;也可以直接對表征上升沿(yán)速度的脈衝信號進行低通濾波獲得表征占(zhàn)空比(bǐ)信息的電壓信號,對此電壓信號進行誤差調整(zhěng)。
Tel: +86-769-21665206
Fax: +86-769-21665256
網址:www.nbjfsz.com
總公司地址:廣東省東莞(wǎn)市萬江街道(dào)華爾泰路2號五盈科(kē)技園5棟3層
經營產(chǎn)品:碳化矽器件、IGBT單管、IGBT模塊、肖特基/整流橋堆、低壓MOS、超結MOS
版權所有:Copyright © 2019 東莞市草莓视频官网電子有限公司 粵ICP備19137317號版權所有 模(mó)仿必究

結MOS丨碳化矽二極管丨IGBT模塊-東莞市草莓视频官网電子有限公司官網")